
360 Degree 8 m LiDAR held Sensor for ROS Robot Module LiDAR Scanner short Measuring Sensor held the range of 0.13 to 8 m

- Weight:
- 0.30 KGS




Description
Product parameters
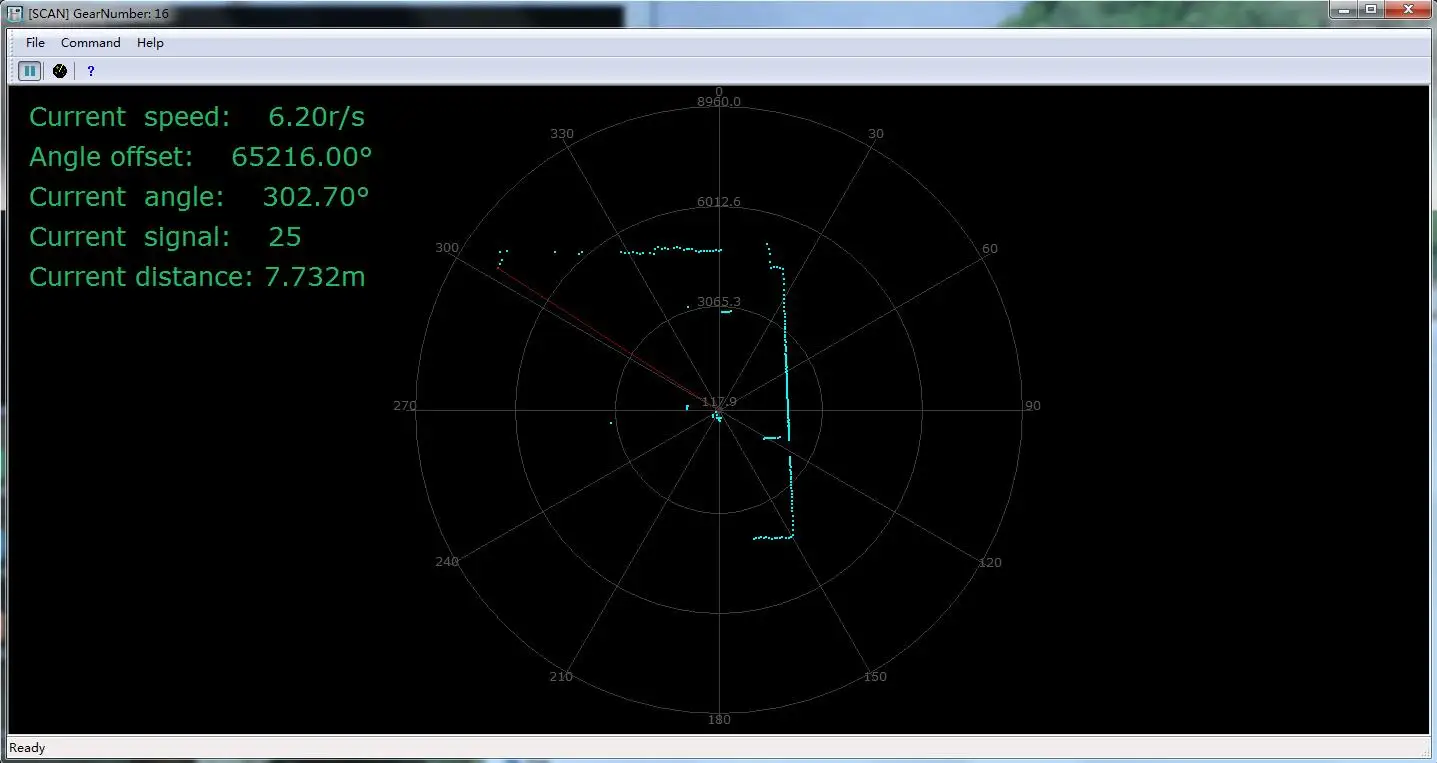
Range: 0.13m - 8m (white wall)
Sweep frequency: 6.2Hz(4-10Hz)
Laser power:3mW (max)
Distance coefficient of variance: DCV<0.2%
Voltage: 5V
Baud rate: 230400
Working environment temperature: 0 ° C - 45 ° C
Work environment humidity: <90%
Sampling rate: 5K/s
Laser wavelength: 780nm
Accuracy:
Communication interface: RS232 (TTL) 3.3V-TTL
Power consumption: 1.5 W
Working current: 500 mA
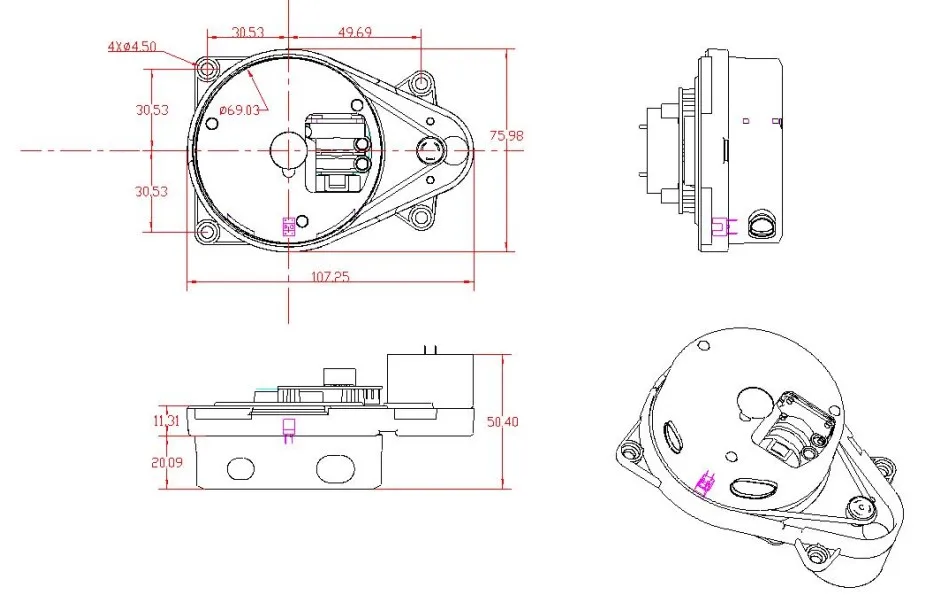
Size: 107 * 76 * 53 mm
Levelness 0 ° - 1 °
Work environment illumination<1000Lux
Working mode: 8 bit data, 1 bit stop bits, no check.
Baud rate: 230400
Output low level: <0.4
Output high level: 2.9-3.5
Application environment:
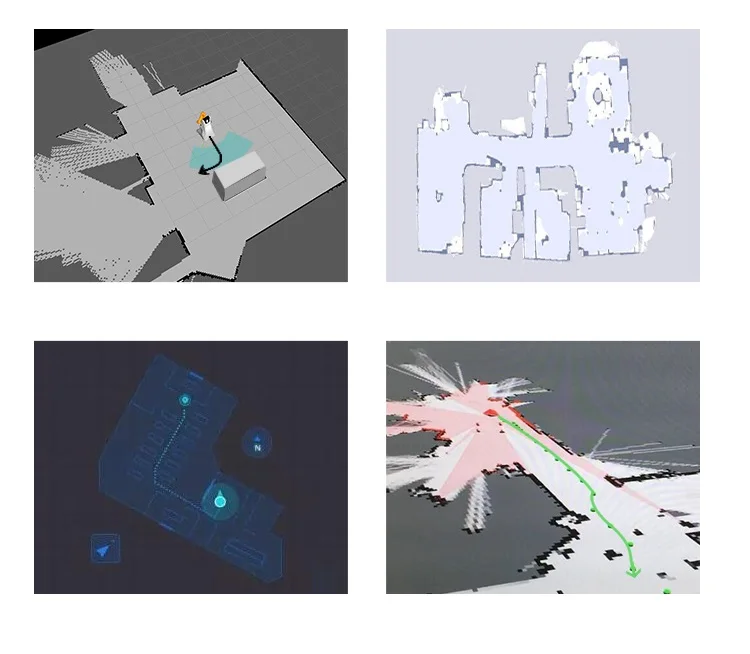
1. Robot SLAM positioning and obstacle avoidance
2. fast and accurate surveying and mapping
3. robot ROS development
4. game interaction.
The ideal working environment of the radar is indoor, and indoor illumination (including no light) will not affect radar work. Please avoid using Qiang Guangyuan (such as high-power laser) to directly irradiate radar's optical vision system.
If you need to use it outdoors, avoid the optical vision system of the laser radar directly facing the sun, which may lead to permanent damage to the optical chip of the optical system, so that the distance measurement will be invalidated.
The range of radar will be shortened under the condition of strong sunlight reflection.
Related Products
Related Products


Industrial 16m 360 Degree 8-15hz Laser Sensor LiDAR Scanner for ROS Robot Module Measuring Sensor LIDAR


Industrial 8m 360 Degree Laser Sensor LiDAR Scanner for ROS Robot Module short Measuring Sensor 3iLIDAR A0602




